



MOBILE MANIPULATOR WITH INTEGRATED KINOVA ARM
OUTDOOR ENVIRONMENTS
UP TO 5 H OF AUTONOMY
REMOTE TURN ON/OFF


Mobile Robot ideal for R&D applications due its versatility, flexibility and modularity
The RB-SUMMIT Autonomous Mobile Robot is designed to perform a wide range of R&D applications in indoor and especially outdoor environments.
Its versatility, size and high mobility make the RB-SUMMIT useful in all types of terrain for tasks such as logistics, transport or agriculture, with a payload of 50 kg.
This robust and modular multi-purpose mobile platform can navigate autonomously or be teleoperated by means of a Pan-Tilt-Zoom camera that transmits video in real time.
Also available is the RB-SUMMIT+ mobile manipulator, developed from the RB-SUMMIT platform and the Kinova Gen2 Ultra lightweight robot arm.
RB-SUMMIT uses the open and modular architecture based on ROS 2.
TECHNICAL SPECIFICATIONS
AUTONOMY
Up to 5 h.
SPEED
Up to 2,5 m/s
COMMUNICATION
WiFi 802.11 b/g/n/ac
Bluetooth 4.0
ENVIRONMENT
Indoor / Outdoor
IP54
COMPONENTS
INCLUDED
- CPU i7
- Battery UN38.3 - 48VDC@15Ah
- 5G Router
- IMU
- RGBD camera
- Pack 2D LiDARS - 276º
- Chassis IP54
- Charging station
OPTIONAL
- GPS
- GPS + Base Station GPS
- 3D LiDAR Robosense Airy
- 3D LiDAR Robosense RS-HELIOS 16P
- 3D SLAM Software Packages
- AI Computing Vision Package
- ZED camera and GPU
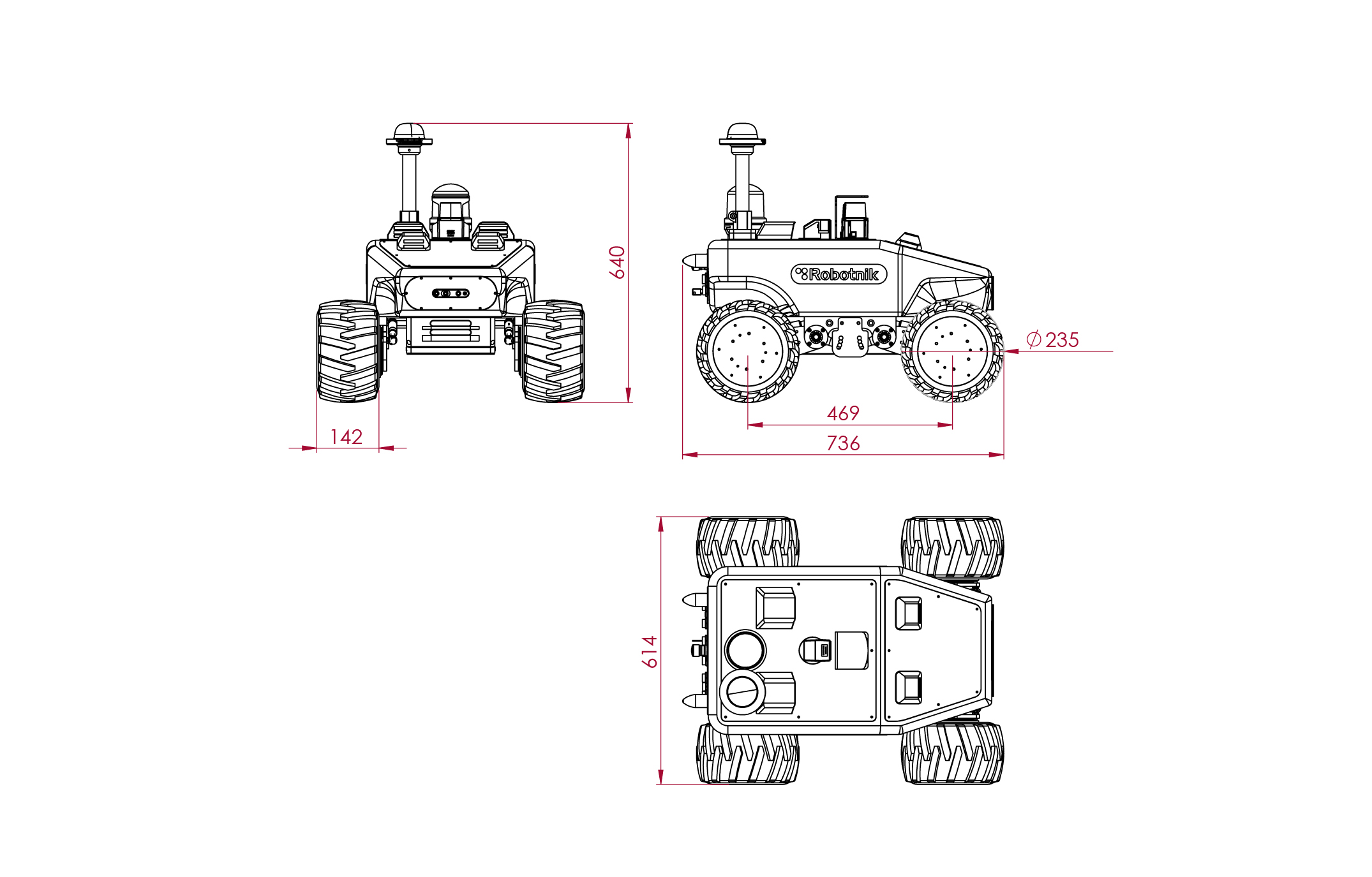
DRAWINGS
APPLICATIONS
LOGISTICS
AGRICULTURE
R & D
GOODS TRANSPORT
CONSTRUCTION









Autonomous mobile manipulator for R&D
RB-SUMMIT+ is the Autonomous Mobile Manipulator designed to execute various R&D tasks in collaborative environments such as laboratories, research centres and other academic environments, addressing final applications related to inspection, medicine or logistics.
This manipulator robot combines the mobility of Robotnik’s RB-SUMMIT platform and the flexibility of Kinova’s robotic arms.
It can handle parts or objects weighing up to 4 kg with high precision, providing optimum performance for tasks such as sample picking, sorting, pick & place, quality control or packaging and labelling.
RB-SUMMIT+ uses the open and modular architecture based on ROS 2.
ARM OPTIONS
Gen3 Lite
Payload: 0,5 kg
Reach: 760 mm
Gen3 6 DOF
Payload: 4 kg
Reach: 891 mm
Gen3 7 DOF
Payload: 4 kg
Reach: 902 mm
TECHNICAL SPECIFICATIONS
AUTONOMY
Up to 5 h.
SPEED
Up to 2,5 m/s
COMMUNICATION
WiFi 802.11 b/g/n/ac
Bluetooth 4.0
ENVIRONMENT
Indoor / Outdoor
IP22
COMPONENTS
INCLUDED
- CPU i7
- Battery UN38.3 - 48VDC@15Ah
- 5G Router
- IMU
- RGBD camera
- Pack 2D LiDARS - 276º
- Charging station
OPTIONAL
- GPS
- GPS + Base Station GPS
- 3D LiDAR Robosense Airy
- 3D LiDAR Robosense RS-HELIOS 16P
- 3D SLAM Software Packages
- AI Computing Vision Package
- ZED camera and GPU
- Robotiq 2F-85 gripper
- Robotiq 2F-140 gripper
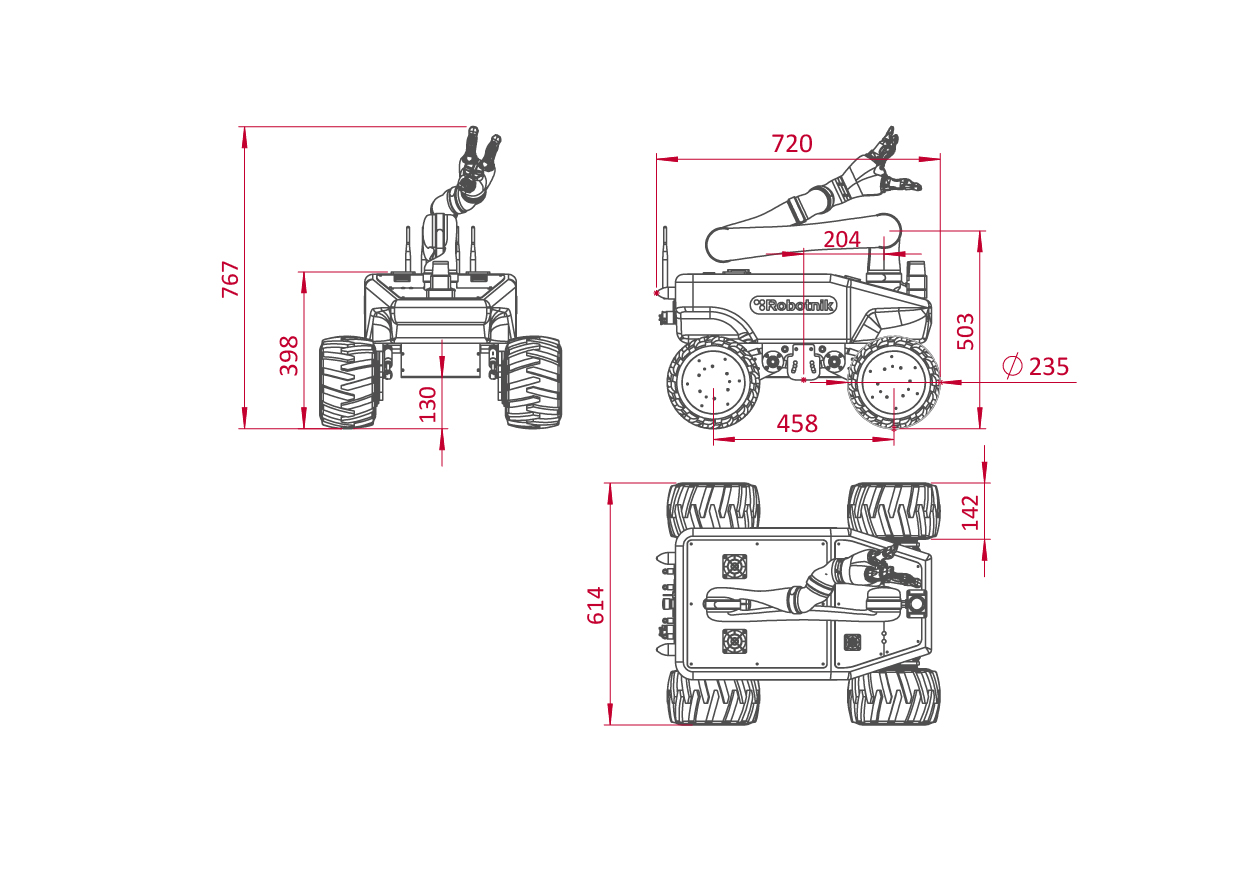
DRAWINGS
APPLICATIONS
PICK & PLACE
AGRICULTURE
R & D
MATERIAL HANDLING
CONSTRUCTION



Free course: How to master RB-SUMMIT with ROS
With the purchase of a RB-SUMMIT we will give you an annual licence in The Construct online academy.
Robotnik’s Software
Robotnik delivers intelligent, scalable and field-proven software solutions for our mobile robots and manipulators. Our software ecosystem combines advanced, ROS-native tools designed to enhance the performance, safety and autonomy of mobile platforms operating both indoors and outdoors.
Built on a modular, scalable architecture fully compatible with ROS 2, our solutions enable fast integration and long-term reliability. The suite includes modules for localization, navigation, perception, manipulation and fleet management, supported by systems such as Robot Local Control (RLC), Command Manager and an intuitive web-based HMI.
Here you can find more information about Robotnik’s software.
