¿Qué es un Robot Móvil Colaborativo?
Un RMC (AMR con sus siglas en inglés) es un robot móvil inteligente capaz de ayudar a una persona en su trabajo en un espacio laboral compartido.
El principal objetivo de cualquier empresa es obtener la máxima eficacia en sus procesos de trabajo. Un Robot Móvil Colaborativo ayuda a lograrlo en lo que se refiere a transporte de mercancías en interiores. De este modo, la robótica móvil en el sector de la logística se optimiza tareas que resultan repetitivas, tediosas y/o peligrosas.
Actualmente, cualquier empresa, por pequeña que sea, está en disposición de implementar esta tecnología.
Ventajas de la robótica y manipulación móvil en el sector de la logística
Puesta en marcha rápida y sencilla
Concebido para compartir el espacio de trabajo con personas
Automatización de procesos repetitivos o inseguros para las personas
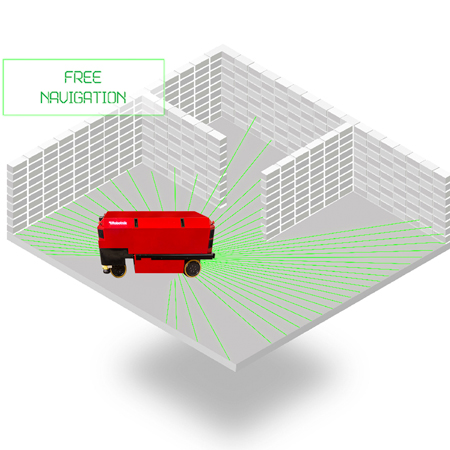
Diferentes soluciones de localización y navegación
Rutas flexibles frente a rutas fijas propias de los AGV tradicionales
Funciones inteligentes avanzadas: seguimiento de personas, acoplamiento a maquinaria y comunicación por voz, entre otros
Dispone de una interfaz de usuario avanzada (HMI) que permite generar mapas así como definir la localización (puntos de referencia) y las rutas de una manera simple e interactiva
Cuenta con un SGF (Sistema de Gestión de Flota) que coordina de forma óptima la flota de robots y los recursos compartidos de la empresa (pasillos, ascensores, etc.)
¿Por qué Robotnik?
Robotnik es referente en Europa en robótica móvil.
En 2008, Robotnik lanzó al mercado sus primeros Robots Móviles Colaborativos para el transporte autónomo en entornos hospitalarios. Desde entonces, nuestra solución para logística se ha ampliado adaptándose a los diferentes entornos propios de fábricas, almacenes o industrias en general.
Nuestro sistema para logística interior supone una solución integral que incluye: flota de robots, sistemas de localización, interfaz de usuario (HMI) y Sistema de Gestión de Flota (SGF).
Razones para incorporar robótica móvil para tareas de logística

Puesta en marcha rápida y sencilla
Flexibilidad y escalabilidad
Rutas flexibles
Colaborativo
Mayor seguridad

Funciones inteligentes

Manejo fácil y flexible

Sistema de gestión de flota fácilmente manejable

Sistema de Gestión de Flota (SGF)
El Sistema de Gestión de Flota (SGF) es el encargado de centralizar la gestión de la flota de robots, lo que permite a los operarios gestionar la misma desde varios dispositivos de comunicación estándar. De esta forma, el acceso a los robots se puede realizar desde cualquier ubicación (oficina, almacén, hogar…) y mediante cualquier dispositivo (PDA, teléfono móvil, tableta, ordenador, …).
El Sistema de Gestión de Flota (SGF) incluye una interfaz gráfica de usuario que permite:
Planificar misiones
Asignar tareas
Planificar rutas
Monitorizar la flota de robots
Ubicación de cada robot, estado del mismo, nivel de batería, estado de la misión, etc.
Monitorizar eventos y alarmas
Monitorizar eventos y alarmas de los robots y de los controladores que gestionan la comunicación con ascensores, puertas y muelles de carga / descarga
La operatividad estándar de una flota de robots en entornos logísticos requiere la ejecución periódica de operaciones de transporte. Estos se definen dentro del SGF como misiones y se gestionan dentro de una base de datos dinámica de acceso remoto.
El SGF ofrece una capa superior de abstracción que permite interactuar con toda la flota de robots como si fuera un sistema único. Se pueden definir diferentes niveles de acceso para que sea posible especificar tipologías de usuarios, cada uno de los cuales tendrá unos determinados privilegios para interactuar con el sistema.
Además, un usuario puede definir misiones con diferentes niveles de detalle. Es posible asignar un robot a una misión determinada o dejar que sea el sistema inteligente quien decida a qué robot de la flota le ordenará dicha misión.
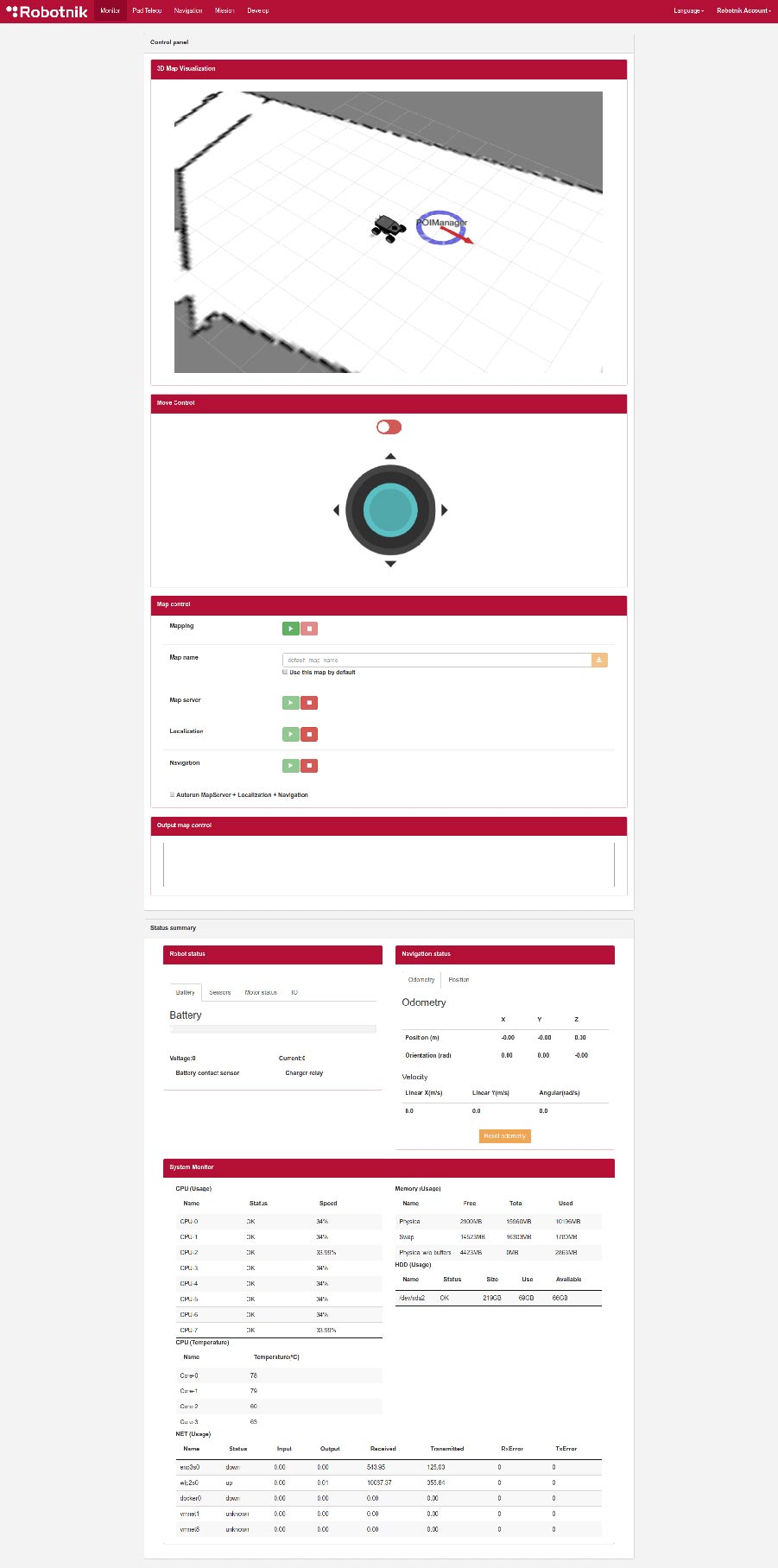
Interfaz de Robotnik
¡Controla tu robot móvil fácilmente!
Las principales características de dicha interfaz son:
Es accesible desde cualquier sistema operativo (Windows, Mac, Linux, …) y desde cualquier tipo de dispositivo (ordenador, tableta, dispositivo móvil, …)
Visualización interactiva 3D de los modelos de los robots, así como del entorno 2D a través del que navegan en tiempo real
Fácil mapeo de entornos reales, almacenamiento simple y recuperación de mapas generados previamente
Control y visualización en tiempo real (transmisión) de las imágenes capturadas por las cámaras del robot
Operación de comandos de localización y navegación autónoma, además de la posibilidad de realizar un control manual del robot
Definición, selección y edición de puntos de referencia o coordenadas de navegación que el robot alcanzará de forma autónoma
Monitorización en tiempo real del estado de los recursos del robot: uso independiente de cada procesador, temperatura, uso del disco, …
Estado de los sensores de a bordo (temperatura, Unidad de Medida Inercial u odometría, entre otros)
Monitorización de los niveles del robot en tiempo real (nivel de batería, estado del motor o estado de los componentes, entre otros)