

R&D indoor applications
RB-1 MOBILE MANIPULATOR
RB-1 MOBILE MANIPULATOR
RB-1 is a robot with ample possibilities of manipulation which integrates a 6/7 DOF arm
AMBIENT ASSISTED LIVING
INDOOR ENVIRONMENTS
UNTIL TO 13 GDL




Mobile manipulator with until to 13 DOF
RB-1 is an autonomous and configurable robot, focused on the field of research in indoor applications.
Mobile manipulator
RB-1 can be configured in different ways:
- RB-1 without arm, ready to integrate a Kinova arm.
- RB-1 with 7 or 6 DOF arm with the option to integrate a 2 or 3 finger gripper.
- RB-1 with 7 DOF Gen3 Ultra lightweight arm from Kinova, 2D / 3D vision and parallel gripper integrated.
Arm
RB-1 can integrate the Kinova Gen2 Ultra lightweight robot 7 or 6 DOF arm and incorporate a 2 or 3 fingers gripper or integrate the Gen3 Ultra lightweight robot arm of 7 GDL, integrated 2D / 3D vision and Robotiq 2F-85 parallel gripper. These allow users to interact with their environment in total safety, freedom and efficiency. Soundless and smooth movement with unlimited rotation on each axis.
Platform
The manipulator base can be mounted with a wide range of lasers which have 5 to 30-60 meters operational range. Depending on the model, the view goes from 240º to 270º.
The software of the robot includes a control system, a tracking system laser-based and a navigation system, as well as a HMI user interface for diagnostics and remote control.
Pan-tilt unit
The robot integrates a 2 DOF pan-tilt unit for the perception of the environment by an included ORBBEC camera. The RGBD sensor has various applications on the robot. It can be used to recognize objects in the surrounding area, but also for navigation and location purposes by using benchmarks or new RGBD Slam algorithms.
RB-1 uses an open architecture and modular control based on ROS.
RB-1 APPLICATIONS
R&D
AAL (Ambient Assisted Living)
Indoor mobile manipulation
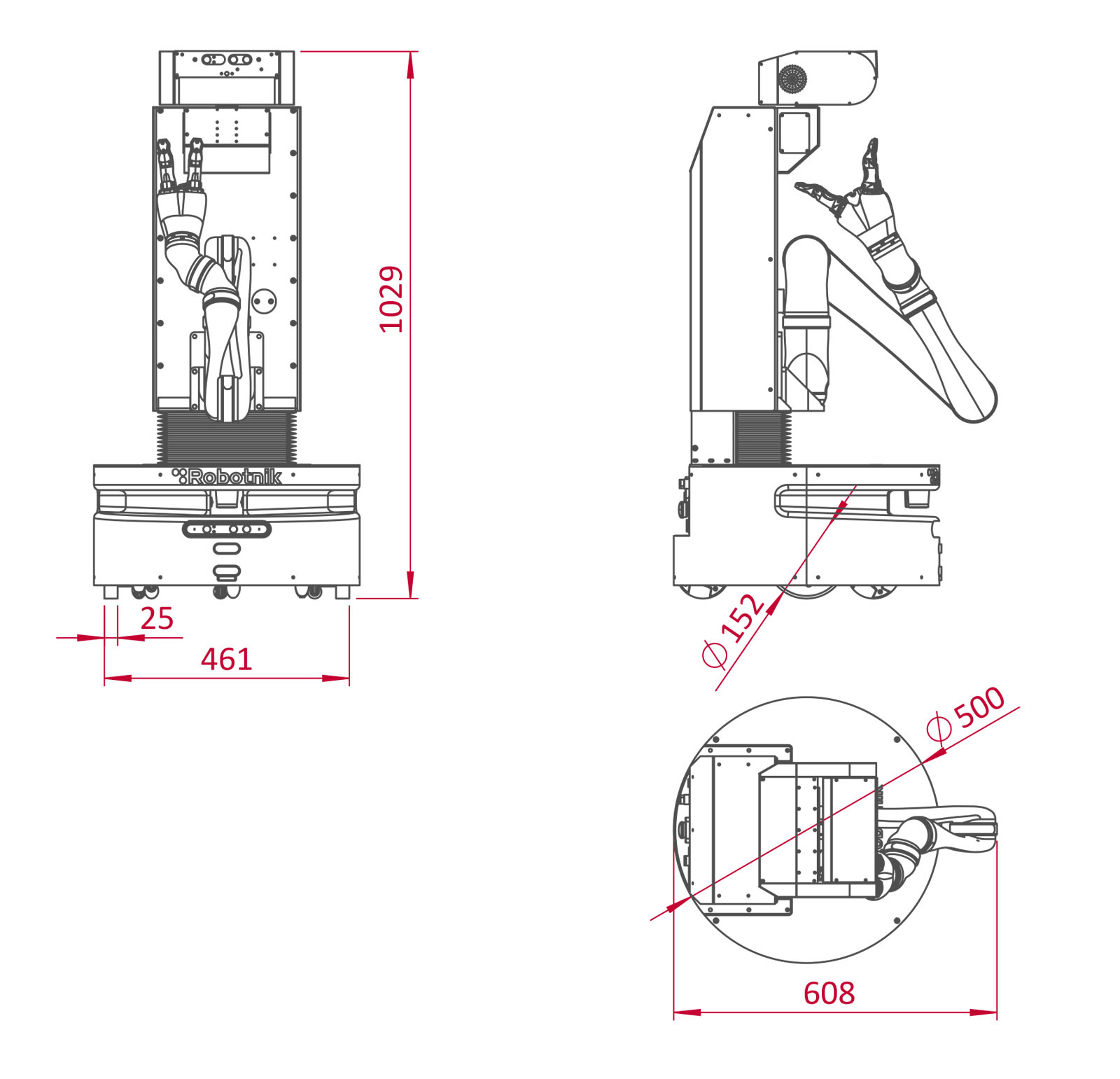
BLUEPRINTS
Request more information
Request more information