Resistant and versatile
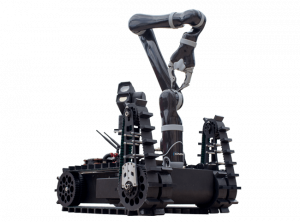
XL-GEN MOBILE MANIPULATOR
XL-GEN MOBILE MANIPULATOR
The mobile manipulator XL-GEN arises from the union among Kinova Robotics and Robotnik featuring an excellent platform
R&D APPLICATIONS
INDOOR/OUTDOOR ENVIRONMENTS
ARM PAYLOAD (6 DOF): 2,6 KG
AUTONOMY: UP TO 5 H







Mobile manipulator for R&D
The autonomous XL-GEN can be configured in different ways: without arm, ready to integrate an arm from Kinova or with 7 or 6 DOF arm with the option to integrate a 2 or 3 finger gripper. Due to the low power consumption of the arm, this mobile platform has an autonomy of up to 10 hours.
Furthermore, XL-GEN, that uses open architecture and modular control ROS, can mount different sensors as lasers and cameras, among others.
The robot has two possible kinematic configurations. The omnidirectional configuration mounts mecanum wheels on an independent suspension system. The mecanum wheels can be easily replaced by conventional wheels (rim mount), thus allowing easy switch from the indoor omnidirectional configuration to the versatile skid-steering configuration, both indoors and outdoors.
XL-GEN has been designed for several research applications in fields like inspection, medicine or logistics.
XL-GEN APPLICATIONS
R&D
Remote monitoring
Logistics
Abrupt environments
Inspection
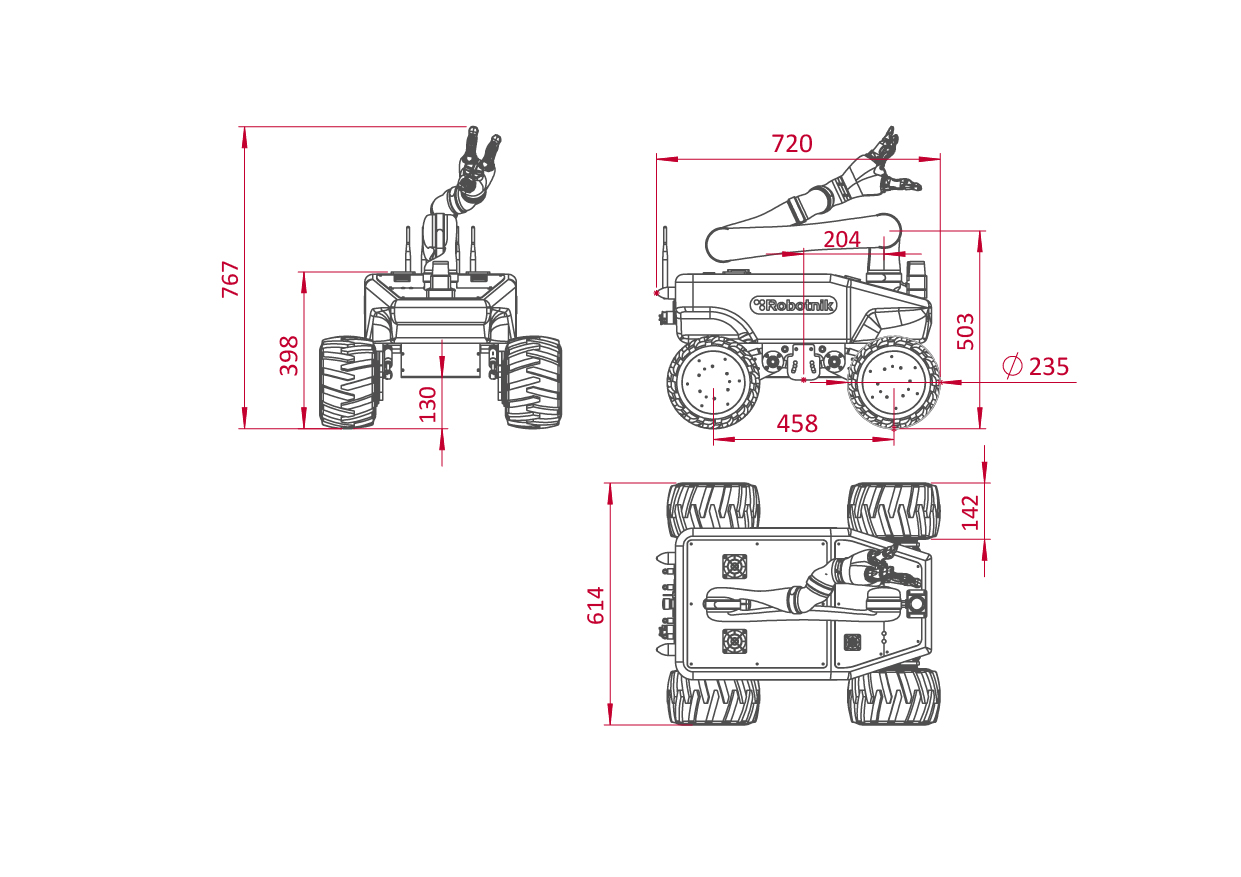
BLUEPRINTS