

150 kg payload
RB-VOGUI MOBILE ROBOT
RB-VOGUI MOBILE ROBOT
Autonomous Mobile Robot (AMR) suitable for indoor and outdoor logistics applications due to its versatility and high mobility
150 KG OF PAYLOAD
INDOOR AND OUTDOOR ENVIRONMENTS
HIGH MOBILITY





Outdoor logistics
RB-VOGUI is a general purpose mobile robotic platform designed primarily for outdoor transport tasks.
It is a highly mobile, all-terrain modular base that can operate in indoor environments, but especially outdoors. Therefore, this AMR is suitable for automating tasks of different nature in sectors such as R&D, agriculture, security or logistics, performing final applications based, for example, on last mile delivery.
Due to its different versions, RB-VOGUI can perform manipulation tasks (RB-VOGUI+) or transport heavier loads thanks to the RB-VOGUI XL version, with a load capacity of 200 kg.
RB-VOGUI is also a robust and collaborative robot, capable of navigating autonomously and avoiding obstacles, if necessary.
This AMR uses steering wheels, allowing different kinematic configurations: omnidrive, ackerman or double ackerman. Specifically, the version with mecanum wheels allows for an omnidrive configuration indoors, while the RB-VOGUI-6 model can overcome obstacles up to 200 mm and move through rough environments.
All Robotnik robots are modular and have a ROS-based architecture.
RB-VOGUI APPLICATIONS
Logistics
Agriculture
R&D
Transport
Last mile delivery
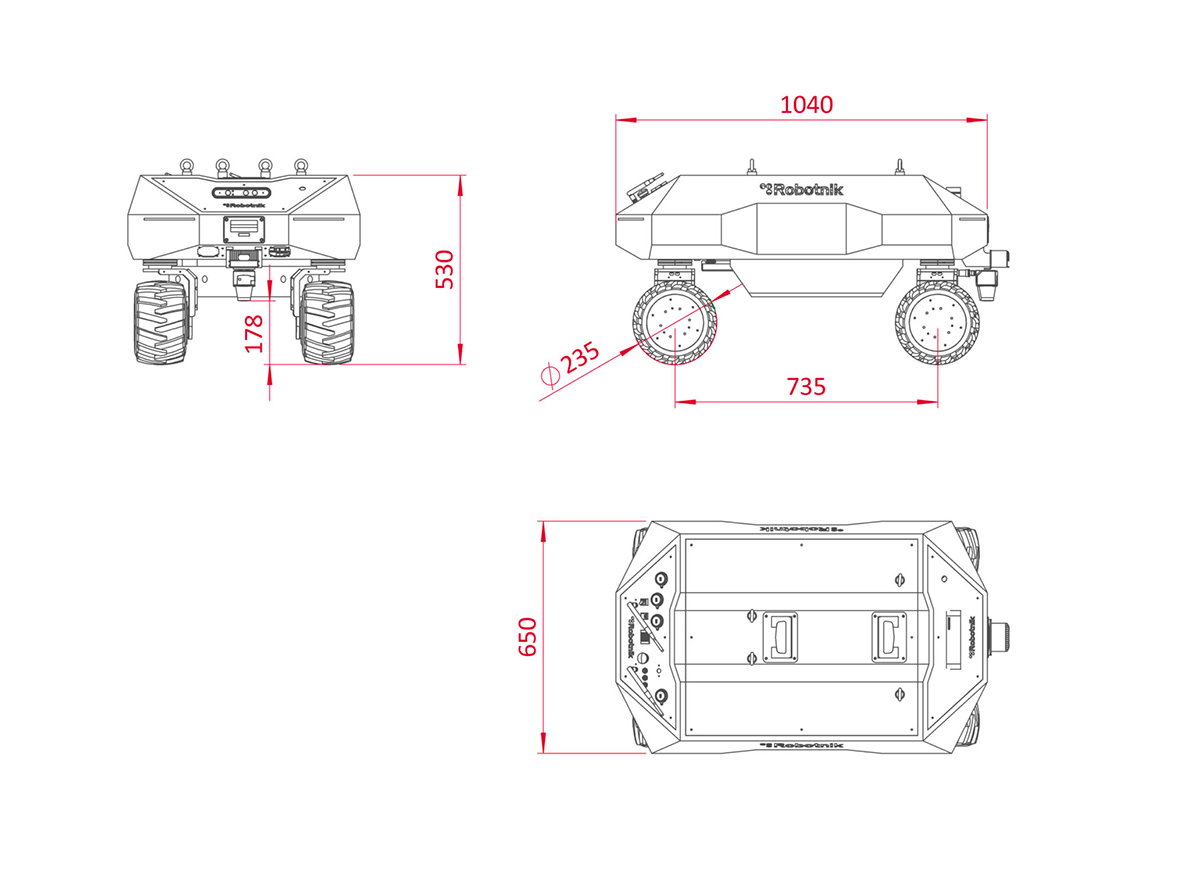
BLUEPRINTS
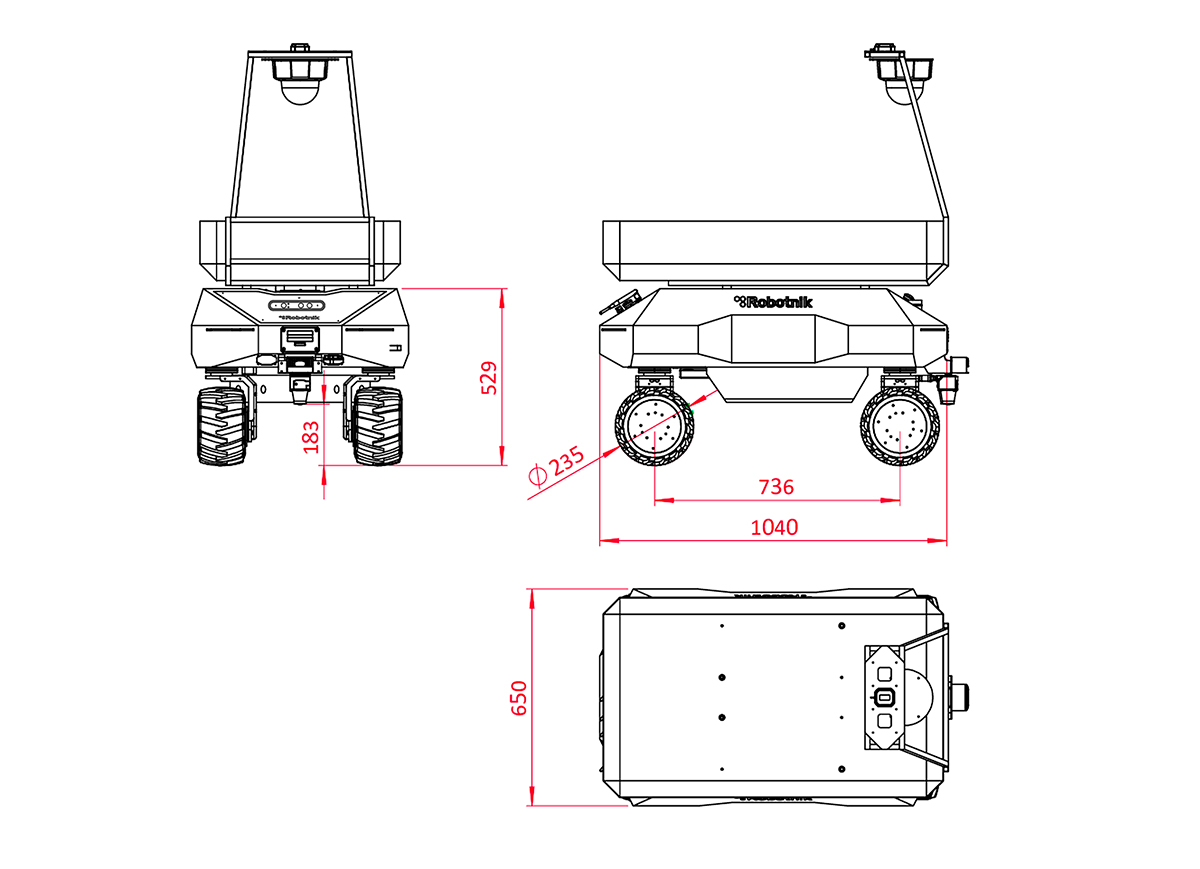
MORE VERSIONS


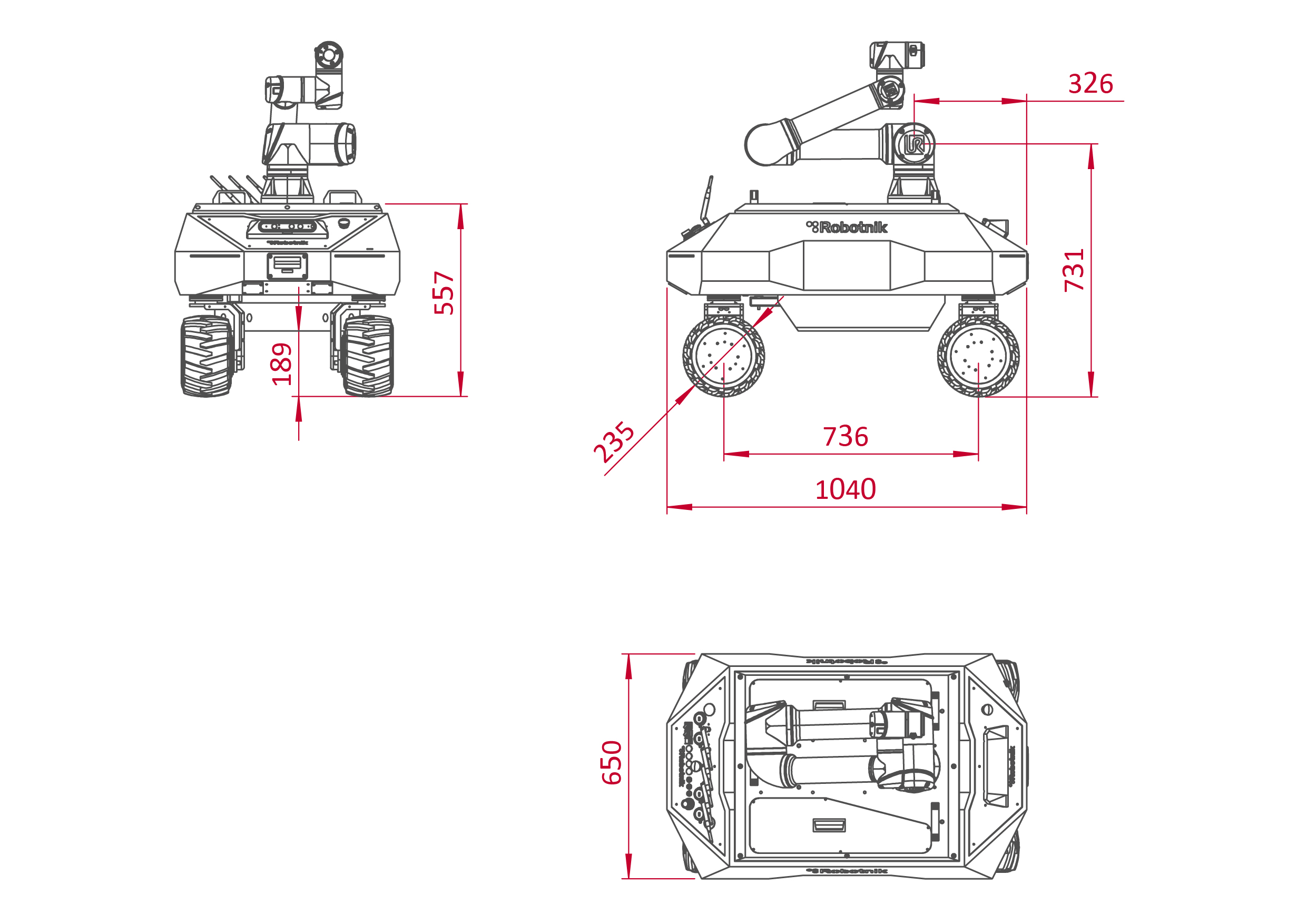
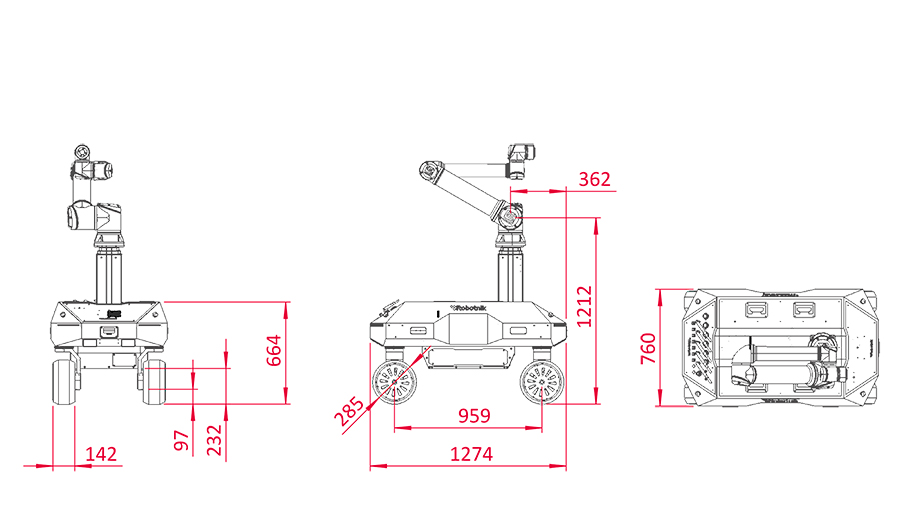
RB-VOGUI+ BLUEPRINTS
Technical Specifications
RB-VOGUI+
MECHANICAL
- Dimensions: 1.040 x 650 x 731 mm
- Weight: 165 kg + 20,6 Kg
- Speed: 2,5 m/s
- Environment: Indoor/Outdoor
- Autonomy: Up to 6h
- Batteries: LiFePO4 30Ah@48V
- Traction motors: 4 x 500 W
- Swerve motors: 2 x 100 W Ackermann/4 x 100 W OMNI 4
- Temperature range: -10°C a +45°C
- Payload: Up to 120 Kg
- Maximum slope: 47%
CONTROL
- Controller: Industrial PC Intel i7, Open Architecture based on ROS
- Communication: WiFi 802.11n (5G/4G optional)
- Connectivity: Internal: USB, RS232, RJ45 / External: 2x USB, 2x RJ45, 2x hdmi + USD, 5, 12 VDC and 48v power supplies
Accessories
- UR5 Arm (e-Series)
- 3D Lidar
- 3D range cameras
- 6 DOF tracking camera
- PTZ camera
- Lift system
- Towing system
- Docking station
- End effector
- Tool camera
- Radio control station
- GPS
- Standard or safety 2D lidar
- Vulkollan wheels


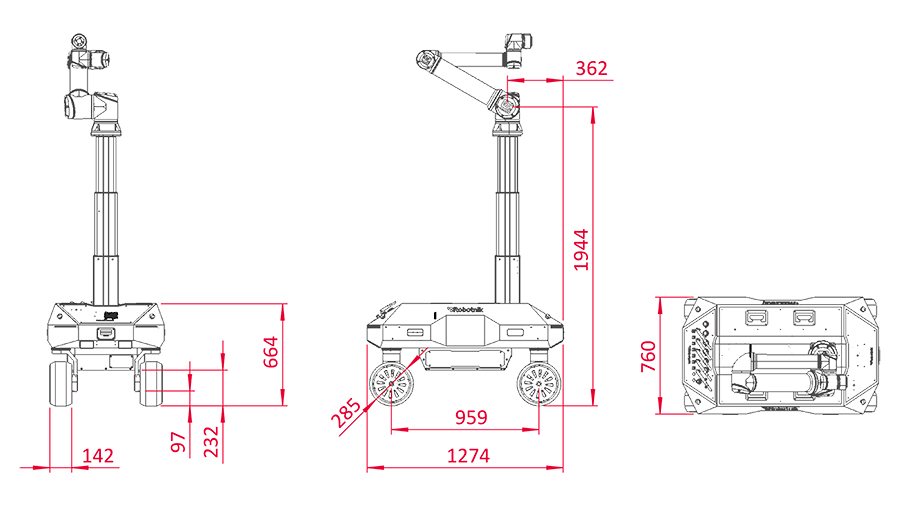
RB-VOGUI XL

Technical Specifications
RB-VOGUI XL
MECHANICAL
- Dimensions: 1.274 x 760 x 690 mm
- Weight: 250 Kg
- Speed: 1 m/s
- Environment: Indoor/Outdoor
- Autonomy: Up to 5h
- Batteries: LiFePO4 30Ah@48V
- Traction motors: 4 x 750 W
- Swerve motors: 2 x 200 W Ackermann / 4 x 200 W OMNI 4
- Temperature range: -10°C a +45°C
- Payload: Up to 200 Kg
- Maximum slope: 47%
CONTROL
- Controller: Industrial PC Intel i7, Open Architecture based on ROS
- Communication: WiFi 802.11n (5G/4G optional)
- Connectivity: Internal: USB, RS232, RJ45 / External: 2x USB, 2x RJ45, 2x hdmi + USD, 5, 12 VDC and 48v power supplies
Accessories
- Arm 2xUR10 (e-Series)
- Telescopic tower
- 3D Lidar
- 3D range cameras
- 6 DOF tracking camera
- PTZ camera
- Docking station
- End effector
- Tool camera
- Radio control station
- GPS
- Standard or safety 2D lidar
- Remote safety button
- Vulkollan wheels






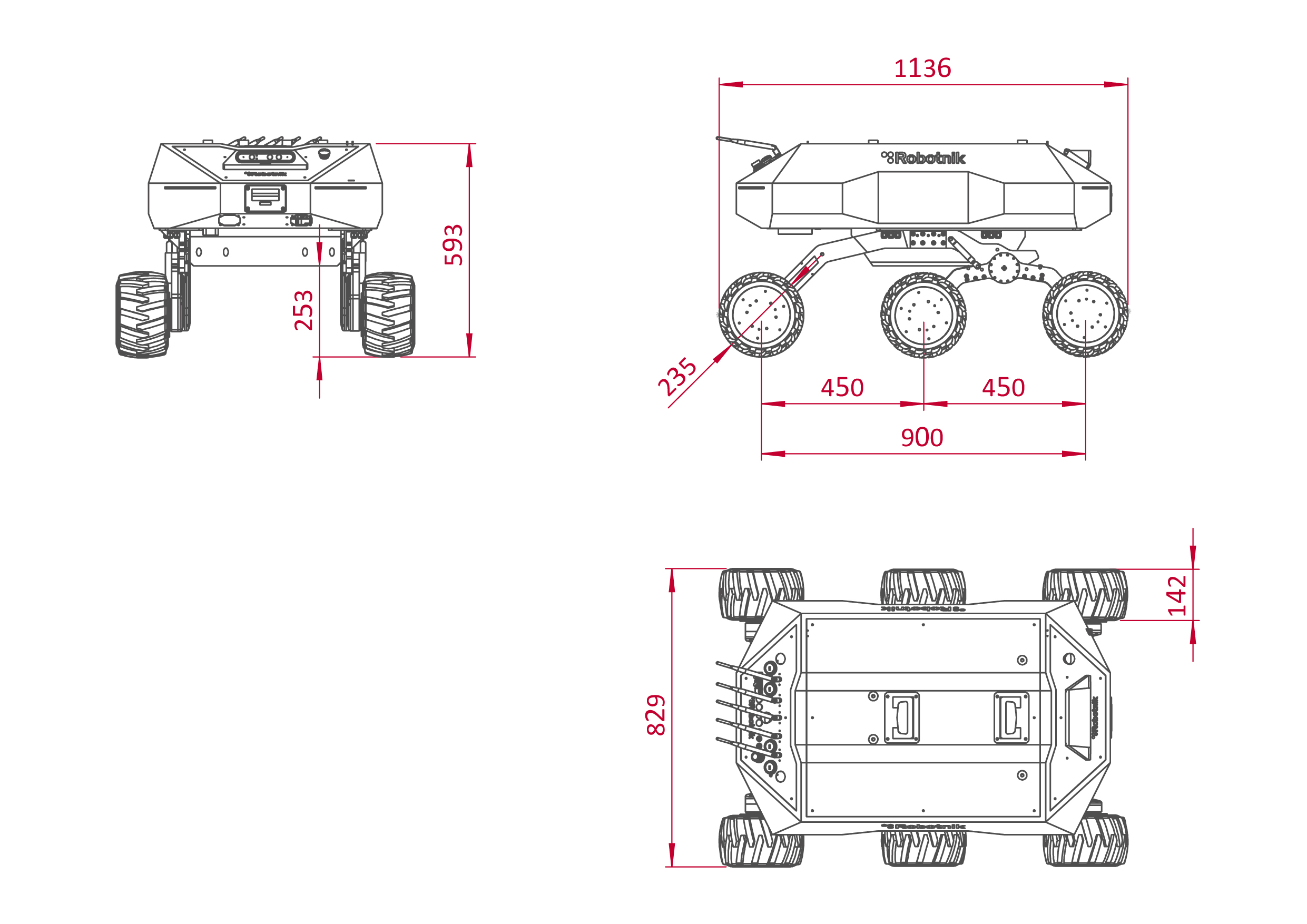
RB-VOGUI 6
Technical Specifications
RB-VOGUI 6
MECHANICAL
- Dimensions: 1.136 x 829 x 593 mm
- Weight: 142 Kg
- Speed: 2,5 m/s
- Environment: Indoor/Outdoor
- Autonomy: Up to 7h
- Batteries: LiFePO4 30Ah@48V
- Traction motors: 6 x 500 W
- Temperature range: -10°C a +45°C
- Payload: Up to 150Kg
- Maximum slope: 47%
CONTROL
- Controller: Industrial PC Intel i7, Open Architecture based on ROS
- Communication: WiFi 802.11n (5G/4G optional)
- Connectivity: Internal: USB, RS232, RJ45 / External: 2x USB, 2x RJ45, 2x hdmi + USD, 5, 12 VDC and 48v power supplies
Accessories
- Arm UR5 (e-Series)
- 3D Lidar
- 3D range cameras
- 6 DOF tracking camera
- PTZ camera
- Lifting unit
- Trailer
- Docking station
- End effector
- Tool camera
- Radio control station
- GPS
- Standard or safety 2D lidar
- Last Mile Delivery Set
Free course: How to master RB-VOGUI+ with ROS
With the purchase of a RB-VOGUI+, we will give you an annual license in The Construct online academy.