

Configurable and versatile
SUMMIT-XL MOBILE ROBOT
SUMMIT-XL MOBILE ROBOT
Autonomous Mobile Robot (AMR) designed to operate indoor and outdoor
50 KG OF PAYLOAD
INDOOR AND OUTDOOR ENVIRONMENTS
AUTONOMY: UP TO 5 H








Versatility and resistance
SUMMIT-XL is a highly versatile Autonomous Mobile Robot (AMR) capable of carrying loads of up to 65 Kg.
The mobile robot can navigate autonomously or be teleoperated by means of a Pan-Tilt-Zoom camera that transmits video in real time.
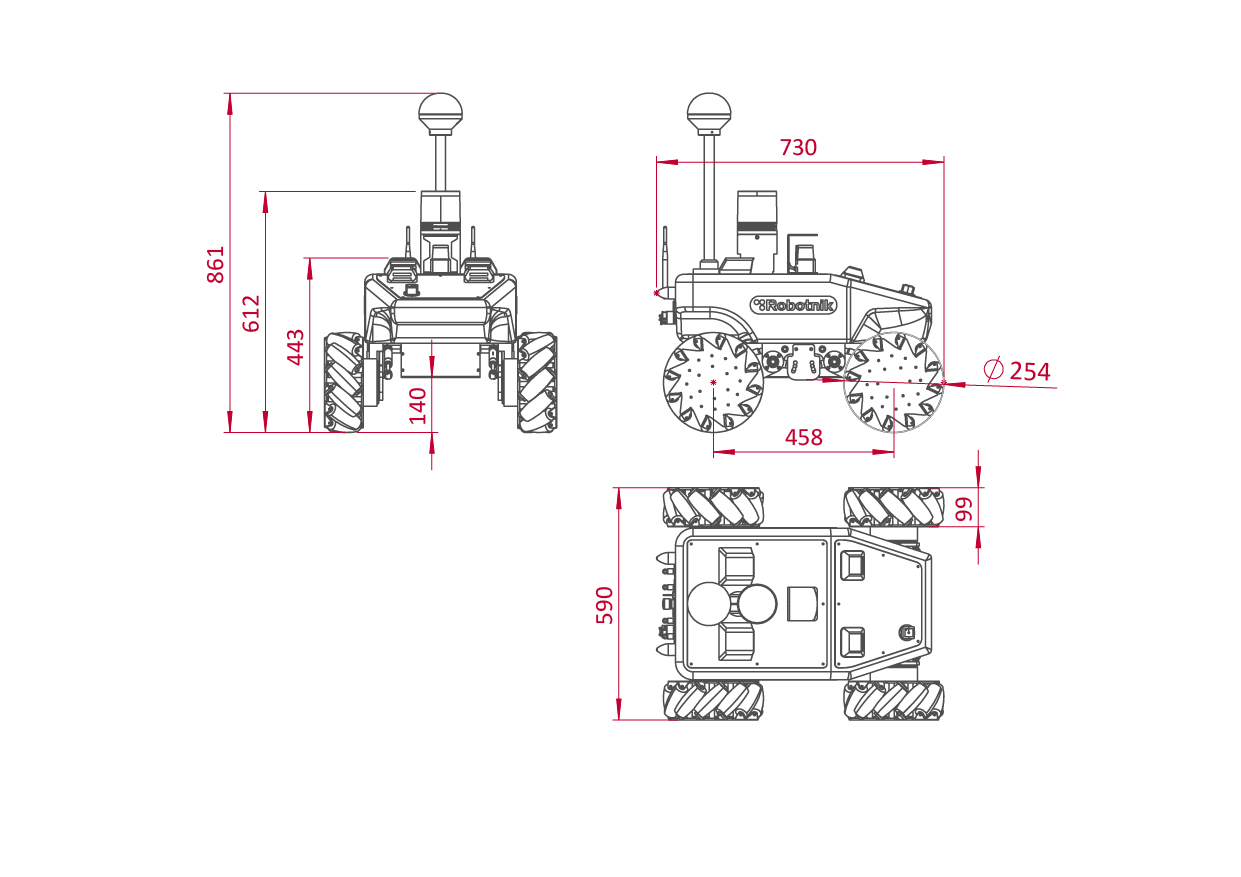
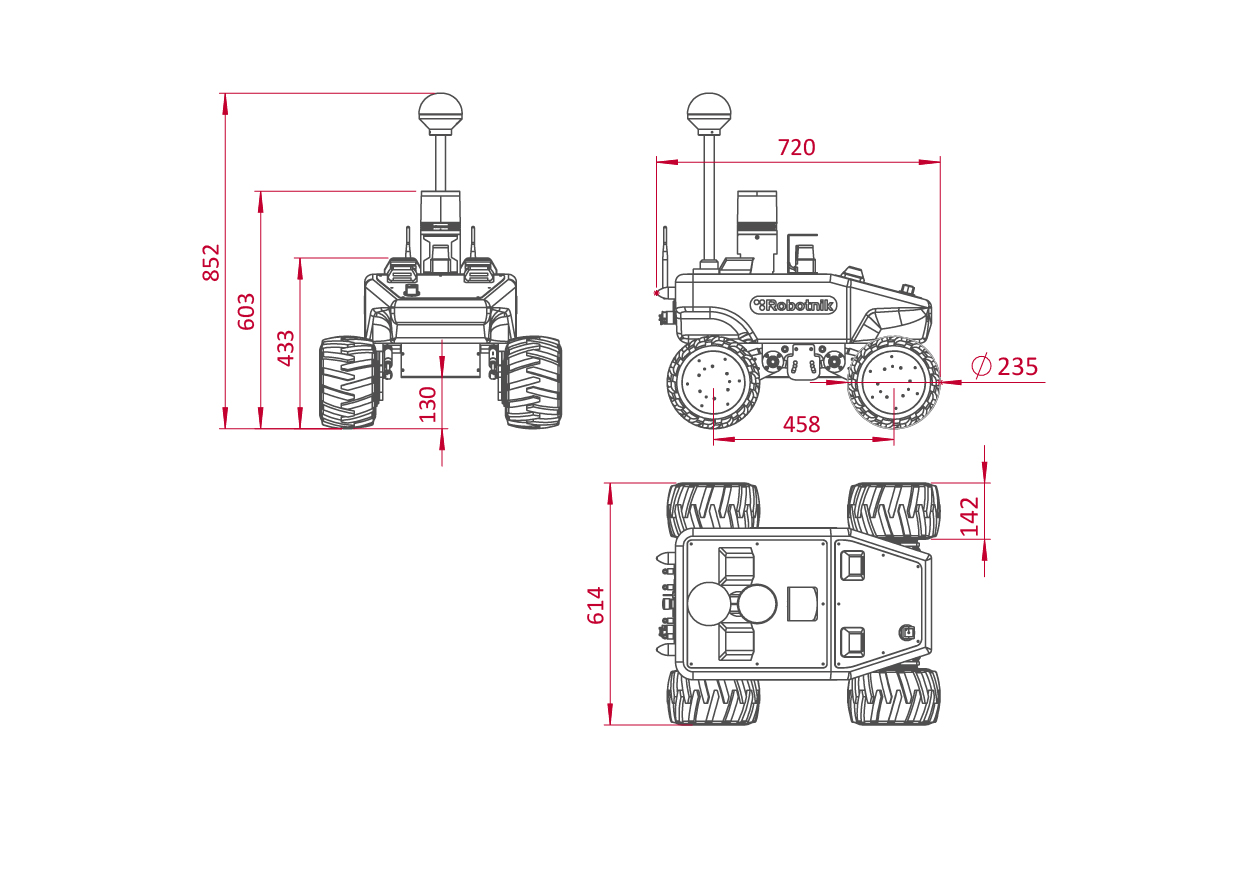
The platform allows two types of configurations: with mecanum wheels or with rubber wheels. The former are recommended for indoor places while the latter are appropriate for outdoor environments. This makes the robot an agile and highly mobile vehicle.
The common sensor options include a Hokuyo laser scanner and a range of RTK-DGPS kits . Likewise, it has internal and external connectivity to easily connect all kinds of components.
SUMMIT-XL uses the ROS open architecture.
SUMMIT-XL APPLICATIONS
Logistics
Agriculture
R&D
Transport
Construction
BLUEPRINTS
Free course: How to master SUMMIT-XL with ROS
With the purchase of a SUMMIT-XL we will give you an annual licence in The Construct online academy.